Filter Acceleration as Inclination Angle
If this option is selected, a real-time filter is applied so that the inclination of the sensor is computed and the data is stored and plotted as angles in the range [-90, 90] degrees.
It is recommended that the sensor be calibrated before using this option for accurate angle measurements.
The algorithm used for computing the filtered values is as follows:
- The data are low-pass filtered with a 5 Hz finite-impulse-response (FIR) filter, using a Blackman window and a filter kernel size of 255. The latency introduced by this filter is approximately 1.72 seconds when operating at the low data rate (2000 Hz EMG / 148 Hz ACC) and approximately 0.86 seconds when operating at the high data rate (4000 Hz EMG / 296 Hz ACC). This filter removes the dynamic impact component of the acceleration. Note that changes in inclination that happen at a rate of 5 Hz or greater will be attenuated by this filter.
- The data are converted to tilt along three axes according to the following equations, and the output is expressed as degrees in the range [-90, 90].
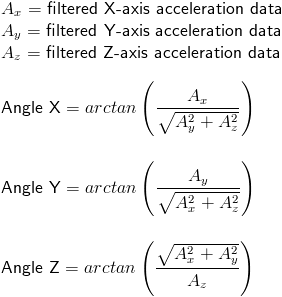
Interpret each filtered axis as follows:
|
Channel Name |
Filtered Channel Interpretation |
|
ACC X |
The angle between the X-axis and the horizontal plane. |
|
ACC Y |
The angle between the Y-axis and the horizontal plane. |
|
ACC Z |
The angle of the Z-axis relative to gravity. |
Because the arctangent is a nonlinear function, the sensitivity (accuracy) changes throughout the range of measurement. For easy comparison when using this option, the overall latency introduced by the impact and inclination real-time filters is identical. The latency may be corrected for with the TIME SHIFT calculation in EMGworks analysis.
This option is available to all sensors that contain acceleration data channels [Standard Trigno, Snap Lead, Spring Contact, EKG]